
ТЕХНИЧЕСКАЯ ПОДДЕРЖКА
Как расположить ведущие колеса шасси робота

Поскольку применение роботов AGV продолжает углубляться и развиваться, моя страна также провела множество исследований и демонстраций методов ходьбы AGV. В конечном счете, система привода стала основной темой приложений мобильных роботов из-за простой конструкции ведущего и ведомого колес, высокой скорости движения, плавности работы и низкой стоимости. В зависимости от различных сценариев применения, условий эксплуатации и требований к управлению рациональность компоновки колесной передачи AGV имеет решающее значение для стабильности и надежности операций проекта.
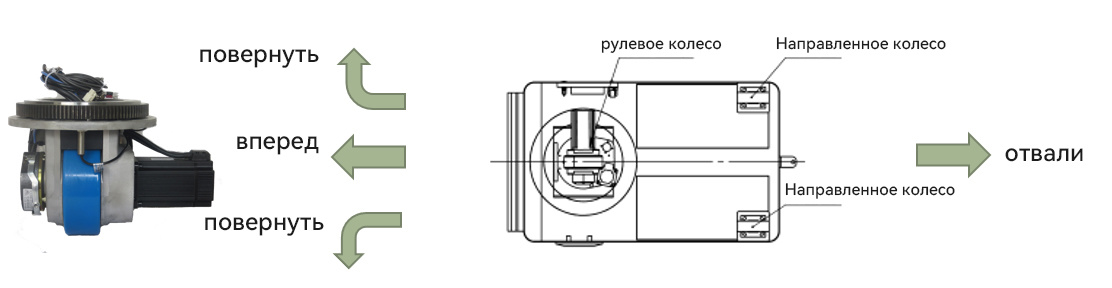
1. Тип одного руля направления
Одноколесные AGV в основном представляют собой трехколесные модели (некоторые AGV могут быть оснащены несколькими ведущими колесами для повышения устойчивости, но устройство рулевого привода имеет только одно рулевое колесо. В основном они опираются на шарнирно-сочлененное рулевое колесо в передней части AGV). как ведущее колесо, так и последнее. Два ведомых колеса спарены, и переднее колесо управляет вращением. Преимуществами одноколесного рулевого привода являются простота конструкции и низкая стоимость. Поскольку это одноколесный привод, нет необходимости рассматривать вопросы координации движений. Поскольку трехколесная конструкция имеет хорошее сцепление с дорогой и отвечает общим требованиям к грунту, она подходит для самых разных условий и случаев. Недостатком является плохая гибкость, рулевое управление имеет радиус поворота, а действия, которых можно достичь, относительно просты. Применимые типы AGV: AGV тяговый, AGV вилочный погрузчик.
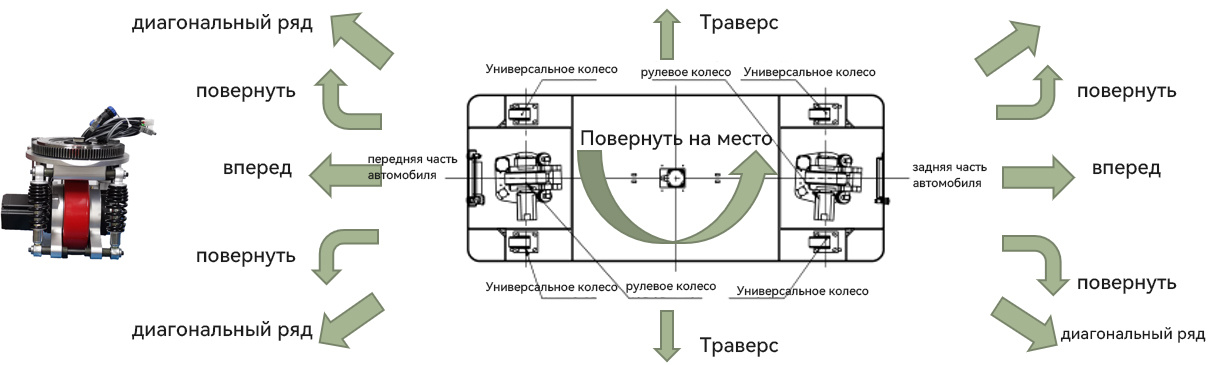
2. Тип двойного руля
AGV с двойным рулевым управлением представляет собой всенаправленный AGV. Автомобиль оснащен рулевым колесом спереди и сзади, а также ведущими колесами с обеих сторон, которые управляются передним и задним рулевыми колесами. Преимущество двойного рулевого привода заключается в том, что он может осуществлять функцию вращения на 360° и универсальное боковое движение, обеспечивая высокую гибкость и высокую точность работы.
Применимые типы AGV: сверхмощный скрытый AGV или парковочный робот.
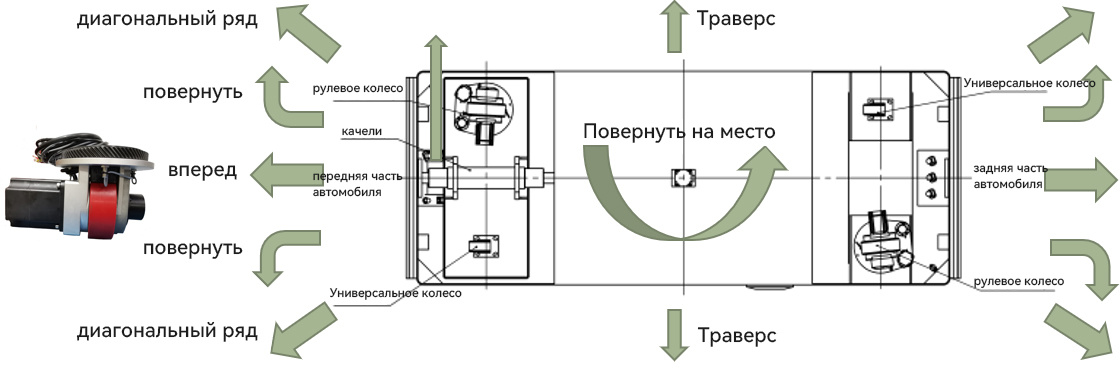
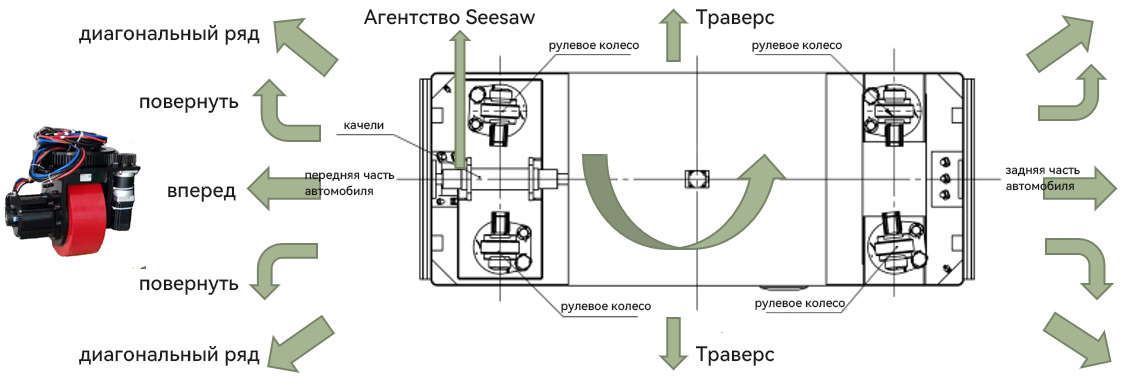
3. Несколько типов рулевого колеса
Многоколесный AGV — это всенаправленный AGV с четырьмя, шестью или восемью колесами, установленными на шасси. Преимущество многоколесного рулевого привода заключается в том, что он может перевозить и тянуть большие грузы, обеспечивать функцию вращения на 360°, а также обеспечивать универсальное боковое перемещение. Также может быть выполнена одноточечная намотка, обеспечивающая высокую гибкость и точность работы.
Применимые типы AGV: тяжелые бортовые грузовики, тяжелые AGV.
Как расположить ведущие колеса шасси робота
Предыдущий
Предыдущий
Связанный контент
Сравнительный анализ руля AGV и дифференциала
2023-04-27
Сравнительный анализ руля AGV и дифференциала
Как разумно спланировать общее применение AGV?
2023-04-27
Как разумно спланировать общее применение AGV?
Продукция

Технология Лтд науки колеса мудрости Гуанчжоу.
№ 1436, Гуанконг 9-я дорога, район Байюнь, Гуанчжоу, Гуандун, Китай
WhatsApp/MB: Келли 86-18102686399
Джексон 8615012435018
Конфеты: 86 19396885135
Авторские права©2024 Гуанчжоу Мудрость Колесо Наука Технология Лтд.
Питание отWww.300.cn SEO Теги En_CityProduct